

La grande maggioranza dei trasduttori di temperatura sono analogici poichè sia la temperatura che grandezza elettrica in uscita variano con continuità. La scelta del trasduttore di temperatura deve essere fatta con attenzione tenendo conto delle condizioni ambientali, dei valori di temperatura da rilevare e della precisione richiesta.
In generale, le caratteristiche richieste sono:
- elevata sensibilità;
- uscita lineare e crescente;
- stabilità di funzionamento nel tempo;
- adattabilità alle diverse esigenze applicative
I sensori di temperatura più comuni
I sensori di temperatura più utilizzati oggi sono la termocoppia, i dispositivi di temperatura-resistivi (RTD), i termistori ed i più recenti sensori integrati al silicio. Ciascuna di queste tecnologie è in grado di soddisfare specifiche condizioni di temperatura e di ambiente.
L’intervallo di temperatura del sensore, la sua robustezza e la sua sensibilità sono solo alcune delle caratteristiche che vengono utilizzate per determinare o meno il dispositivo in grado di soddisfare i requisiti di una determinata applicazione. Non esiste un sensore di temperatura ideale per tutte le applicazioni. La termocoppia può vantare un ampio intervallo di temperatura, il punto di forza dell’RTD è la sua linearità, mentre quello del termistore è la sua accuratezza.
La Tabella 1 riassume le principali caratteristiche di questi quattro sensori di temperatura. Questa tabella può essere utilizzata per una prima selezione del sensore da utilizzare.

Il sensore per tutte le stagioni: la termocoppia
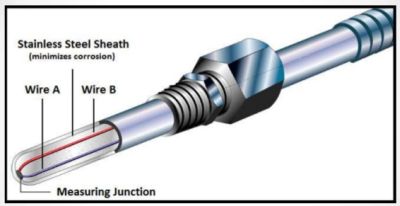
La termocoppia è costituita da due fili di metalli diversi saldati insieme ad una estremità, come visualizzato nella Fig.1. La temperatura del giunto di riferimento – noto anche come punto di compensazione della giunzione fredda – è utilizzato per annullare gli errori generati dalle giunzioni ferro-rame e rame-costantana. La giunzione di collegamento dei due metalli della termocoppia è posizionata sul punto dove si desidera misurare la temperatura. Questa configurazione di materiali produce una tensione tra i due fili non saldati che è funzione della temperatura di tutte le giunzioni. Di conseguenza, la termocoppia non necessita di tensione o corrente di eccitazione.
Poiché esiste una tensione tra le 2 estremità aperte dei due fili, potrebbe sembrare che l’interfaccia della termocoppia potrebbe essere realizzata semplicemente misurando la differenza di tensione tra i 2 fili. Questo potrebbe essere vero se non fosse per il fatto che le estremità dei fili della termocoppia sono a contatto con un altro metallo, di solito il rame.

Questo fatto crea altre 2 termocoppie e introduce un errore significativo nel sistema. L’unico modo per compensare questo errore è quello di rilevare la temperatura alla giunzione di riferimento (Fig.2) e sottrarre il contributo degli errori di queste connessioni attraverso una soluzione hardware o mista di hardware e software.

Teoricamente la termocoppia potrebbe essere costituita da qualsiasi coppia di metalli, tuttavia, in pratica, sono state individuate alcune combinazioni standard di due metalli scelti in base alle loro qualità di linearità e di ampiezza della caduta di tensione rispetto alla temperatura. Questi tipi standard di termocoppia sono E, J, T, K, N, S, B e R (riassunti nella tab. 2 e fig. 2). Le termocoppie sono altamente non lineari e richiedono sempre algoritmi di linearizzazione. Il coefficiente di Seebeck in tab. 2 rappresenta la tensione media fornita dalla specifica termocoppia ad un determinata temperatura.


Le termocoppie sono estremamente non lineari rispetto agli RTD, ai termistori e ai sensori integrati di silicio. Di conseguenza, devono essere eseguiti algoritmi piuttosto complessi per la sua linearizzazione. Tipicamente per ogni tipo di termocoppia deve essere determinata una serie di coefficienti utilizzati per linearizzare la tensione di uscita. Questi coefficienti vengono poi utilizzati nell’equazione:
![\[V_{0}=c_{0}+c_{1}t+c_{2}t^{2}+c_{3}t^{3}+...\]](https://italian-directory.it/wp-content/ql-cache/quicklatex.com-250d926786b148aecb29eb9bc450b861_l3.png "Rendered by QuickLaTeX.com")
In cui V è la tensione fornita dalla giunzione della termocoppia e t è la temperatura.
L’alternativa all’utilizzo di questi calcoli complessi è quella utilizzare la memoria di programma per una tabella di look-up. La tabella di look-up di linearizzazione, ad esempio per una termocoppia di tipo K, è una matrice 11×14 di interi decimali.
La termocoppia può quantificare la temperatura solo in relazione a una temperatura di riferimento. La temperatura di riferimento è definita come la temperatura alla estremità dei fili della termocoppia, nel punto più lontano dal giunto saldato, vedi figura 1 e 2 Questa temperatura di riferimento è di solito misurata utilizzando un RTD, un termistore o un sensore integrato al silicio.

La massa termica della termocoppia è minore di quella di un RTD o di un termistore: ne consegue la maggior velocità della risposta della termocoppia rispetto a questi sensori più grandi. L’ampia gamma di temperature misurabili rende la termocoppia particolarmente adatta ad ambienti ove il rilevamento è difficile.
Conclusioni
In conclusione, possiamo dire che termocoppie vengono solitamente scelte per la loro ampia gamma di temperature misurabili, per la loro robustezza, e per il prezzo. Precisione e buona linearità sono difficili da ottenere e questo le rende inadatte a sistemi di precisione. Se si richiede un elevata accuratezza, altri sensori di temperatura possono essere un’alternativa migliore.



